

 联系我们
联系我们

机器人行走轴模型导入与布局
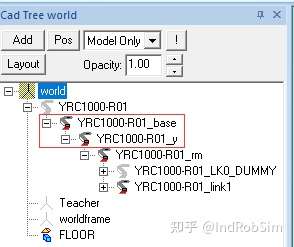
机器人外部轴参数配置完成后,手动刷新Cad Tree对话框,然后展开机器人资源节点,可以看到在其下生成的外部轴资源节点YRC1000-R01_base和YRC1000-R01_y,分别代表行走轴的导轨和滑台。
若是手动刷新后Cad Tree中没有自动生成外部轴资源节点,则可以先保存仿真项目,关闭软件后再重新打开,并加载创建的仿真项目,这时Cad Tree中就会显示外部轴资源节点了。
以世界坐标系world为父级参考对象,分别导入拆分好的机器人行走轴导轨模型SlideWay和滑台模型Slide,导入方法可参考之前发布过的文章《MotoSimEG-VRC软件:除了自建数模,你还可以进行外部数模导入》。
模型导入后,使用“Pos”命令将导轨模型与滑台模型分别布局到合适的位置。设定两个模型的位置和姿态数据时一定要完全一样,这样才能始终保持行走轴处于装配状态。
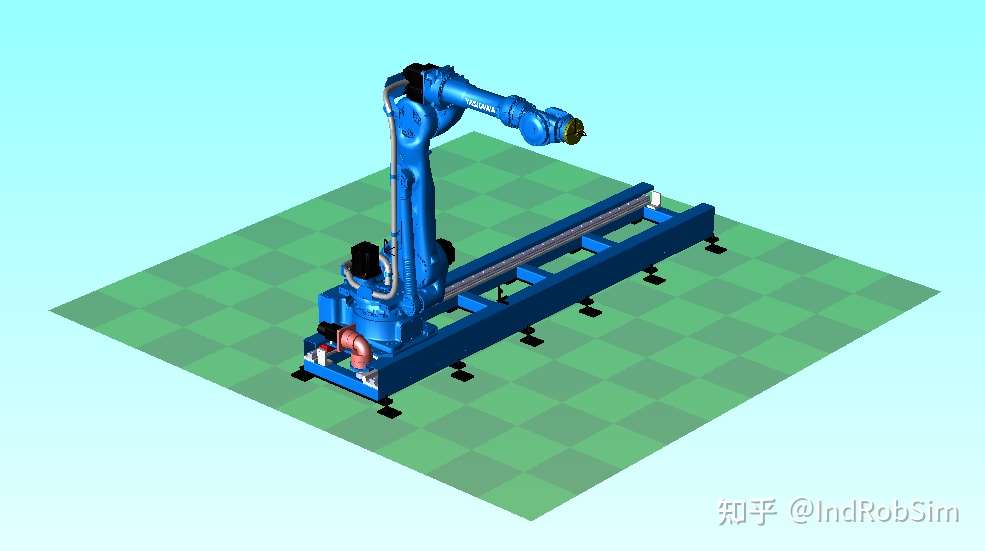
在Cad Tree中点选机器人资源节点YRC100-R01,然后将机器人移动到行走轴的滑台模型上。再将虚拟仿真环境的地面模型扩大,全部完成后的效果如下图所示。
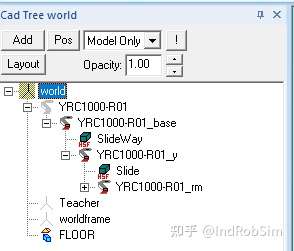
左侧Cad Tree中右击行走轴导轨模型SlideWay,然后依次选择“Model Attribute”→“Set Parent…”,再选择外部轴资源节点YRC1000-R01_base,将行走轴导轨模型与机器人外部轴资源节点YRC1000-R01_base安装到一起。
参考上述步骤将行走轴滑台模型Slide与机器人外部轴资源节点YRC1000-R01_y安装到一起。这样,机器人就与行走轴完全安装到了一起。
了解更多信息请咨询:安川机器人
