

 联系我们
联系我们

机器人外部轴配置
通常情况下,行走轴都是作为机器人外部轴类型的设备。当然,如果不涉及到与机器人的联动插补类运动也可以作为普通的设备。本案例中的行走轴也是作为机器人的外部轴,因此需要对机器人的外部轴参数进行配置。
在“Controller”菜单栏下点击“Maintenance Mode”命令按钮,以维护模式打开机器人虚拟示教器,配置机器人系统参数。这一步也可以在新建机器人控制器时直接点击“Maintenance Mode Execute”按钮,即以维护模式创建机器人控制器,同样可以配置机器人系统参数。
虚拟示教器显示界面中,依次点击“Main Menu”→“SYSTEM”→“SETUP”,进入设置界面。
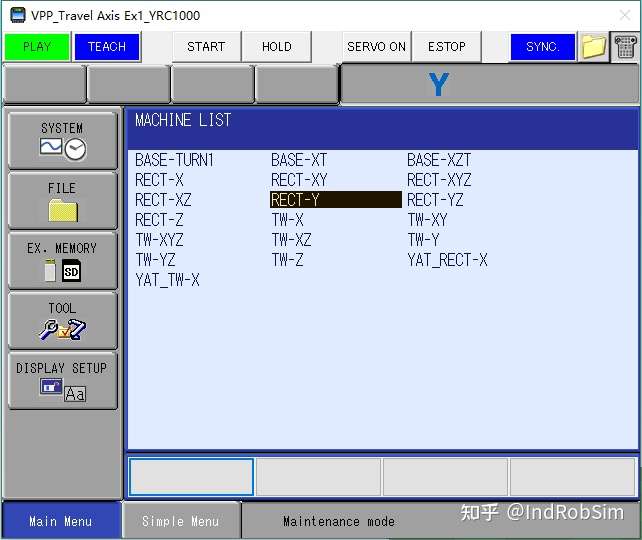
选择“CONTROL GROUP”进入控制组界面,然后在“B1”后选择“DETAIL”,进入MACHINE LIST界面。在其中选择“RECT-Y”,即沿着机器人Y轴方向运动的直线运动机构。***后在虚拟示教器操作面板上按“SELECT”键,进入CONNECT(STO)界面。
值得注意的是在CONTROL GROUP界面中,R代表机器人本体控制组,B代表外部直线运动机构控制组(如机器人行走轴),S代表外部旋转运动机构控制组(如伺服焊枪、变位机等)。
CONNECT(STO)界面无需任何设置,保持默认即可。直接按“ENTER”键,进入AXES CONFIG界面。此界面用于定义机器人外部轴的机械传动形式,如齿条齿轮传动、滚珠丝杠传动等。本例中的机器人行走轴属于齿条齿轮传动,所以要选择“RACK&PINION”。

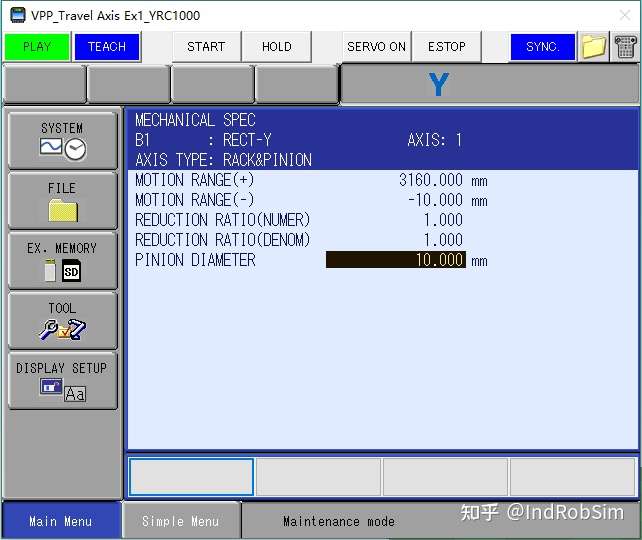
按“ENTER”键,进入MECHANICAL SPEC界面,在此界面中可以配置机器人外部轴的机械参数,详细配置值如下所示,各个参数的详细说明可参见之前发布过的文章《MotoSimEG-VRC软件:基于伺服焊枪的机器人点焊仿真》。
MOTION RANGE(+):3160mm,本案例使用的机器人行走轴行程为0~3150mm,设置行程极限时预留出±10mm的余量。
MOTION RANGE(-):-10mm
REDUCTION RATIO(NUMER):1
REDUCTION RATIO(DENOM):1
PINION DIAMETER:设定齿条齿轮传动机构中齿轮的直径,如10mm
按“ENTER”键,进入MOTOR SPEC界面,也就是外部轴电机参数配置界面。可以根据自己的实际需求选取对应型号的伺服电机以及电机的相关参数,本案例保持默认。
至此,外部轴的参数全部配置完成,按“ENTER”键。在弹出的所有信息提示框中均选择“YES”。然后在VRC Maintenance Mode对话框中点击“End”按钮,待机器人控制器重新启动完成后配置的系统参数立即生效。
了解更多信息请咨询:安川机器人
- 下一篇:机器人行走轴模型导入与布局--安川机器人
- 上一篇:安川机器人系统创建--安川机器人
