

 联系我们
联系我们

机器人系统创建
首先创建机器人虚拟仿真项目,然后新建机器人控制器,控制器新建过程中需要设置的各个参数如下所示:
Create Controller:New VRC Controller (no file)
Controller Type:YRC1000
R1:1-06VX225-A0*(SP210)
Application:MOTOR GUN
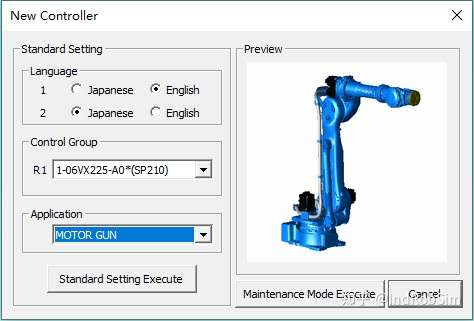
以上相关参数也可以根据自己的实际需求进行选取配置,全部配置完成后点击“Standard Setting Execute”按钮,以标准模式创建机器人控制器。
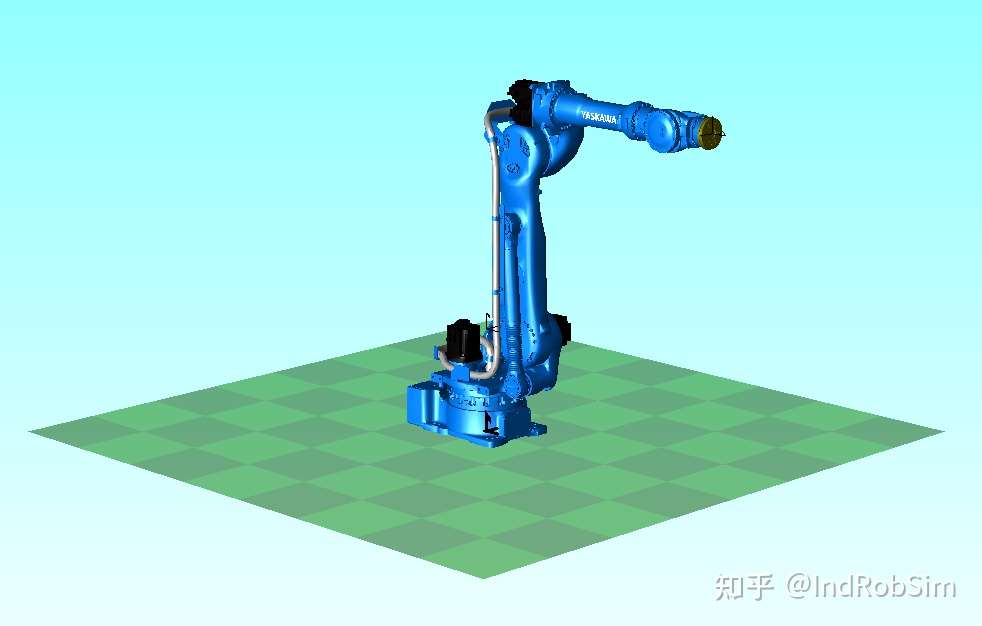
机器人控制器创建完成后,在虚拟仿真环境中出现选择的机器人模型,如下图所示。
了解更多信息请咨询:安川机器人
- 下一篇:机器人外部轴配置--安川机器人
- 上一篇:安川机器人行走拆分--安川机器人
