

 联系我们
联系我们

概述
MotoSimEG-VRC软件除了能够对安川机器人本体进行虚拟仿真以外,还可以对外部轴类机械设备进行虚拟仿真,如机器人行走轴、机器人变位机等。本期,就来介绍一下机器人行走轴虚拟仿真的操作方法。
机器人行走轴模型拆分
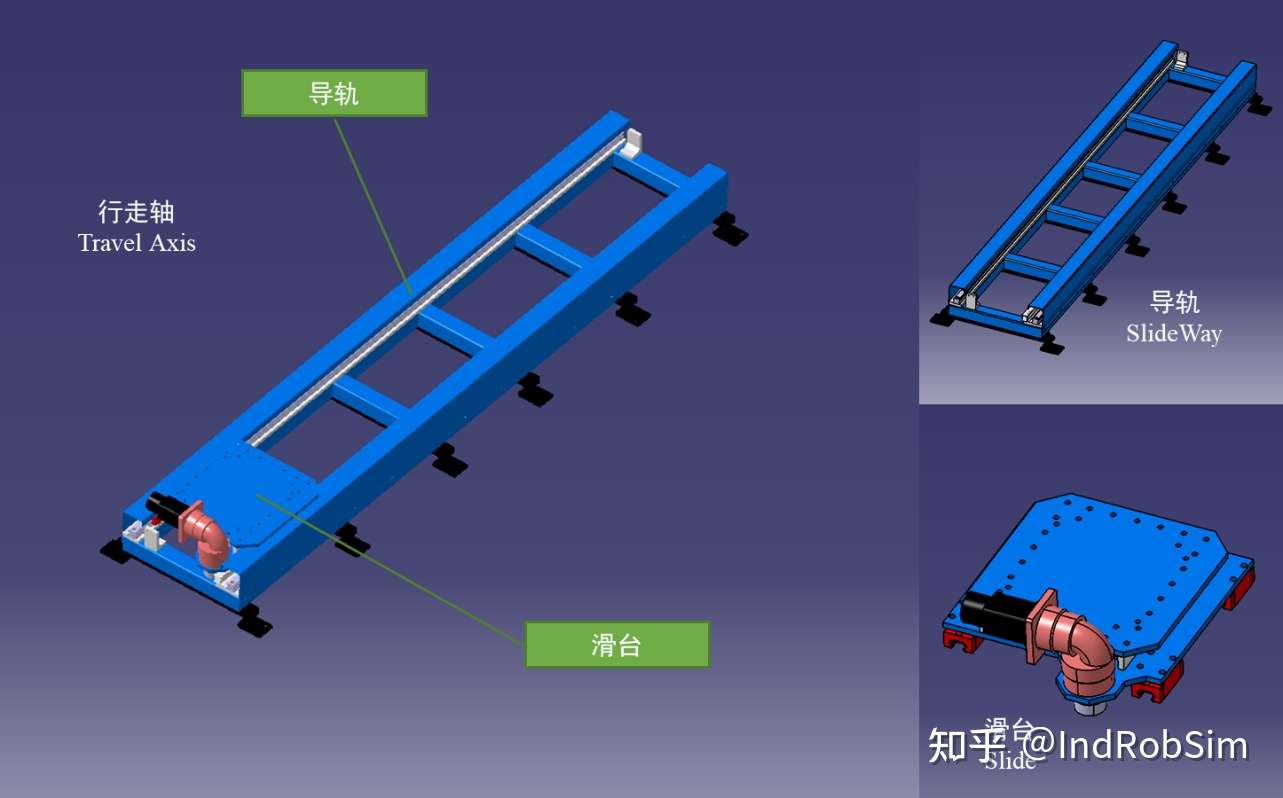
从运动机构的角度分析,机器人的行走轴大致可以分为两个部分,也就是导轨与滑台。其中,导轨是固定不动的部分,而滑台是相对运动的部分。机器人本体安装在滑台上,当滑台沿着导轨运动时,机器人也就实现了行走。
一般情况下,仿真人员从设计人员手里拿到的行走轴模型都是一个完整的装配体,单独的装配体是不能在MotoSimEG-VRC软件中创建运动机构的。因此,仿真人员需要先将装配体模型拆分,分别提取出行走轴导轨模型和行走轴滑台模型,拆分过程可以在机械设计软件中进行,拆分后的模型如下图所示。
了解更多信息请咨询:安川机器人
- 下一篇:安川机器人系统创建--安川机器人
- 上一篇:安川机器人如何选型?--安川机器人
